
Title : Coupling Force Feedback for Surgical Simulators
Project Lead : florent laroche From : Ecole Centrale de Nantes (France)
Dates : from -- to 2014-02-24 08:52:52
Description :
Motivation and objectives :
Minimally invasive surgery (MIS) has become more and more common in the last decade. A minimally invasive procedure typically involves use of laparoscopic devices and remote-control manipulation of instruments with indirect observation of the surgical field through an endoscope or similar devices. These instruments are inserted through the skin or through a body cavity or anatomical opening. This may result in less pain, less strain of the organism, small injuries (aesthetic reasons), economic gain because of shorter hospital stays, etc. On the other hand, there exist some important difficulties for the surgeon as a result of his restricted vision of the organs, difficult handling of the instruments, very restricted mobility, difficult hand-eye coordination and no tactile perception. Therefore, an important training phase is required before a surgeon acquires the skills necessary to adequately perform minimally invasive surgery. Currently, surgeons are trained to perform minimally invasive surgery by using mechanical simulatorsjust like plane pilots have been trained for many yearsor living animals. There is some consensus on the limited realism of the mentioned simulators, due to the complexity of the simulations to be carried out. The latter training method consists in practicing simple or complex surgical procedures on living animals (often pigs for abdominal surgery). Because of the limitations of current training methods, there is a large interest in developing surgery simulation software, possibly with haptic feedback, for providing efficient and quantitative gesture training systems. Haptic feedback takes advantage of a user's sense of touch by applying forces, vibrations, and/or motions to the user. Surgical simulators can be classiffied into three categories or generations. The so called first generation of the simulators is based on the anatomical information. And mainly the geometry of the organs are included in the simulator. The shape, surface, volume and morphology of the organs are considered in the simulators of this category. The second generation of simulators describes the physical properties of the human body; it enables the simulation of basic surgical gestures such as cutting or suturing. There are some simulators of this kind for the simulation of cholecystectomy, arthroscopy of the knee and hepatectomy. Simulators in this category are capable of computing the deformation of the soft tissue under forces and they can also take into account temperature changes. The simulators of the third generation go one step further and consider some aspects of the physiological behavior of the human body. In this way they are intended to model blood flow, organ movements and certain diseases for instance. Realistic simulation-based virtual reality surgical simulators of the second generation are still today out of the reach of computational capabilities of modern small sized computing platform. The main reason stems of course from the complexity of the model to be solved but mostly from the time constraints imposed on the numerical simulation. In order to have realistic force feedbacks from the haptic device, one indeed needs to reach a frequency of 500Hz or more for the update of the force. Recent advances in the model reduction method known as Proper Generalized Decomposition (PGD) open the door to the real-time simulation of physically realistic mechanical models of organs. PGD allows the efficient pre-computation and online evaluation of the solution of the parametric models found in surgery simulations. The proposer, who has been very active in the development of the PGD for such applications (in collaboration with some persons at Ecole Centrale Nantes) wishes to use the haptic device existing at Ecole Centrale Nantes in order to develop the first prototype of a PGD & simulation based virtual reality environment.
Teams :
The Applied Mechanics and Bioengineering (amb) lab of the I3A is formed by some ten tenured faculty members of the School of Engineering and Arquitecture of the Universidad de Zaragoza. This lab is one of the youngest of the university, but nevertheless posseses a strong background in the development of numerical techniques for the simulation in the framework of biomechanics and mechanobiology.
Dates :
starting date : 26 November, 2012
ending date : 30 November, 2012
Facilities descriptions :
http://visionair-browser.g-scop.grenoble-inp.fr/visionair/Browser/Catalogs/COPRODEV.FR.html
Recordings & Results :
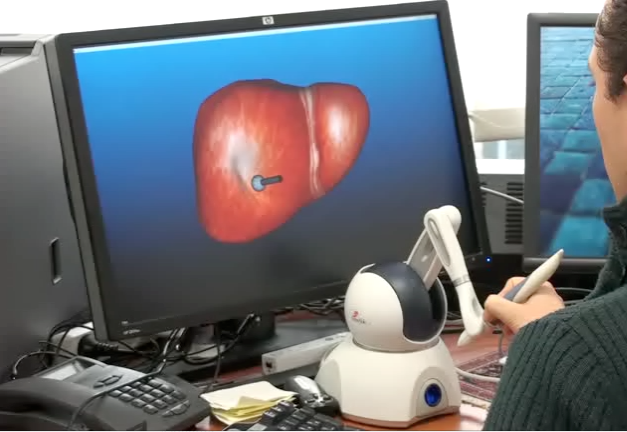
This project aims at assessing the applicability of the PGD as a computational back-end for simulation-based virtual reality applications. In particular this will be tested in computing the force-feedback of a haptic device in the immersive simulation of the palpation of human organs of a surgical simulator. This project will permit the identification of computational, algorithmic and technological bottlenecks in such applications and reduce the remaining gap in the development of second-generation surgical simulators.
Conclusions :
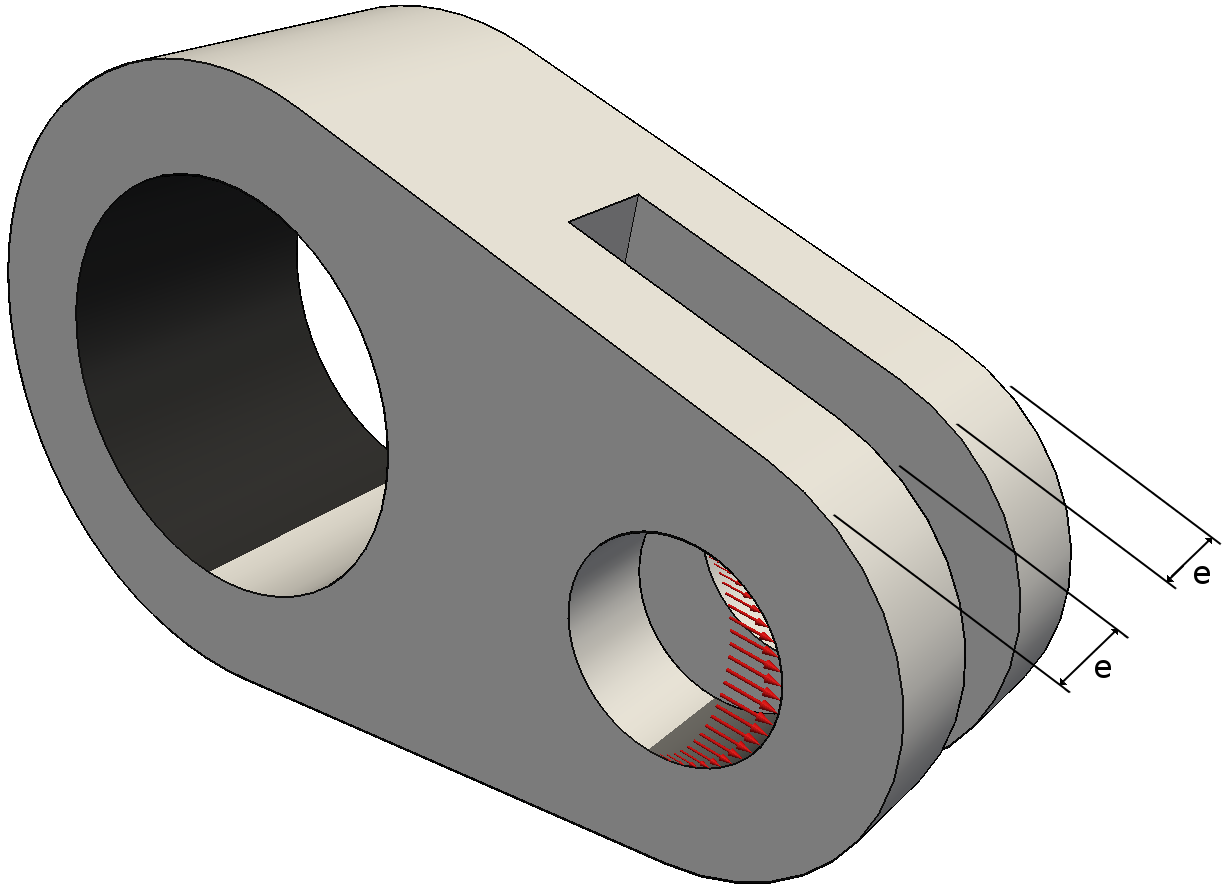
Among others, the collaboration has permitted to converge to a robust algorithm for the determination of the contact point between the palpation device and the deformed liver as well as to validate the robustness of the numerical methodology for evaluating in real time the numerical model used for computing both the visual and force feedbacks. However it has come up that a much smaller haptic device (PHANTOM OMNI HAPTIC DEVICE, http://www.dentsable.com/haptic-phantom-omni.htm) is more relevant for this kind of problems (pencil like handle and easy transport). Following this work, a complete demonstrator has been developed which has been used for demonstrating the potential use of the numerical methods developed by the proposer and the host team coupled to an haptic device.
Project Images :

Other project resources :
acte_CSMA2013.pdf
Fig.7.pdf
.

VISIONAIR / Grenoble INP / 46 avenue Felix Viallet / F-38 031 Grenoble cedex 1 / FRANCE
Project funded by the European Commission under grant agreement 262044
Project funded by the European Commission under grant agreement 262044