
Title : 3D Robotic Swarm Models for Visionair Integration
Project Lead : Cristian Molder From : MIlitary Technical Academy (Romania)
Dates : from 2014-11-24 18:00:33 to 2015-02-04 13:09:45
Description :
Motivation and objectives :
Simulation of a robotic swarm environment using real-life swarm robots designed and already used in other research activities. Use of the 3D environment for the offline development of swarm intelligence algorithms. Objectives: - design of a 3D model starting from a real in-house designde robot - integration of the 3D model into the Visionair environment
Teams :
The research group in robotics consists of young researchers from various scientific fields (electronics & mechanics), graduate students (from the robotics master) and undergraduate students joining the field of robotics.
Dates :
starting date : 19 January, 2015
ending date : 30 January, 2015
Facilities descriptions :
http://visionair-browser.g-scop.grenoble-inp.fr/visionair/Browser/Catalogs/3DICC.HU.html
Recordings & Results :
Simulation of a robotic swarm environment using real-life swarm robots designed and already used in other research activities. Use of the 3D environment for the offline development of swarm intelligence algorithms. Objectives: - design of a 3D model starting from a real in-house designed robot; - integration of the 3D model into the Visionair environment
Conclusions :
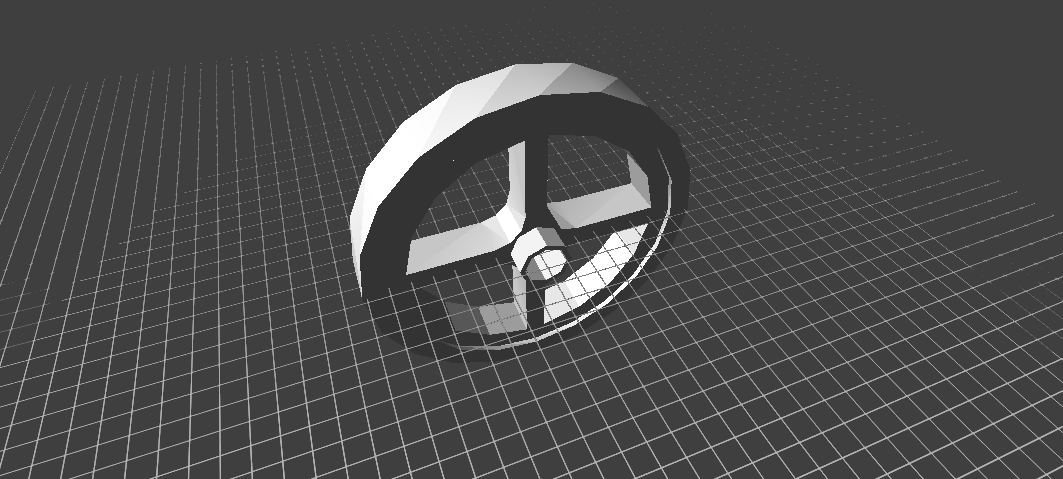
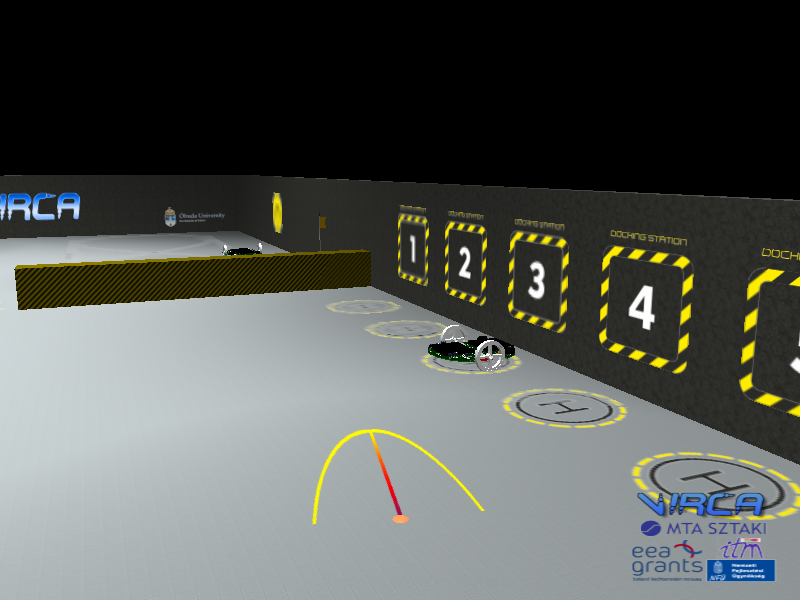
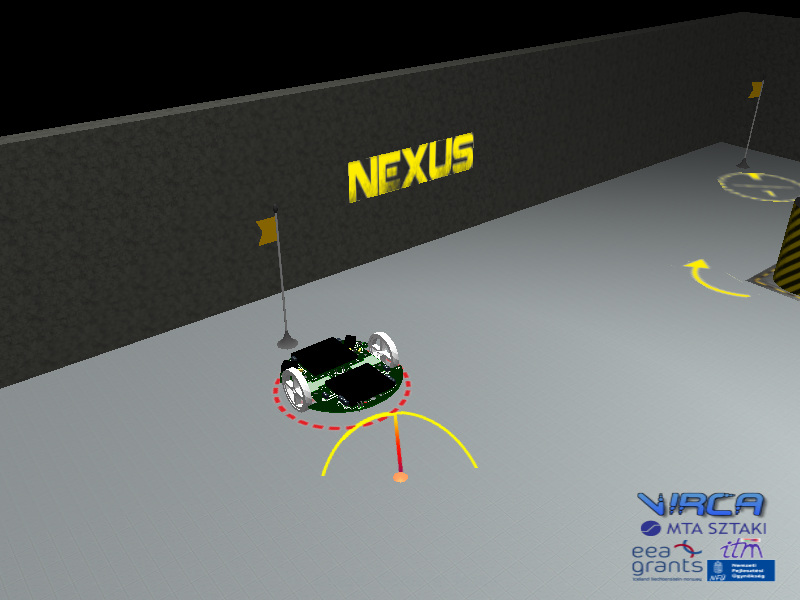
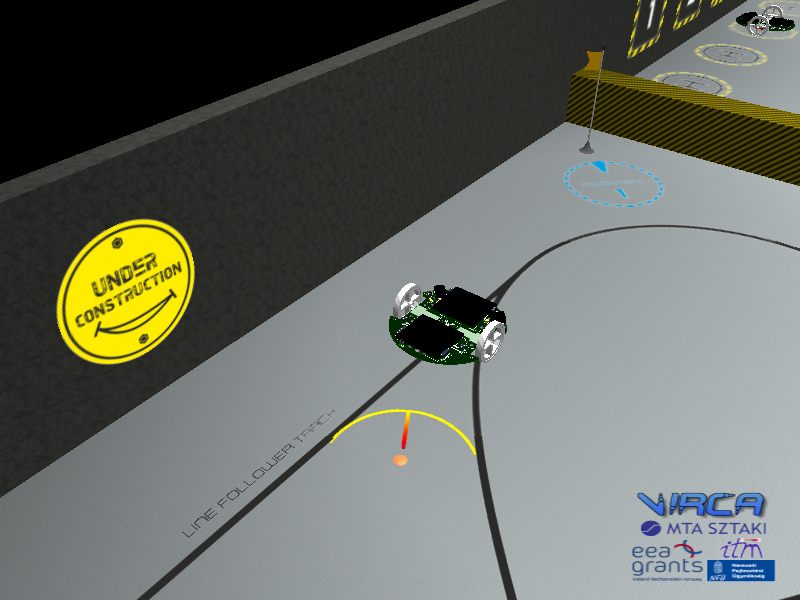
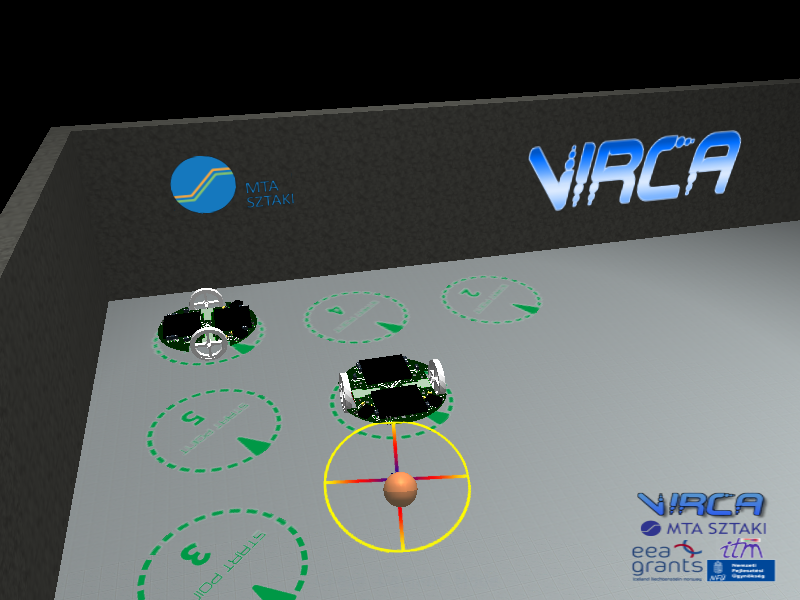
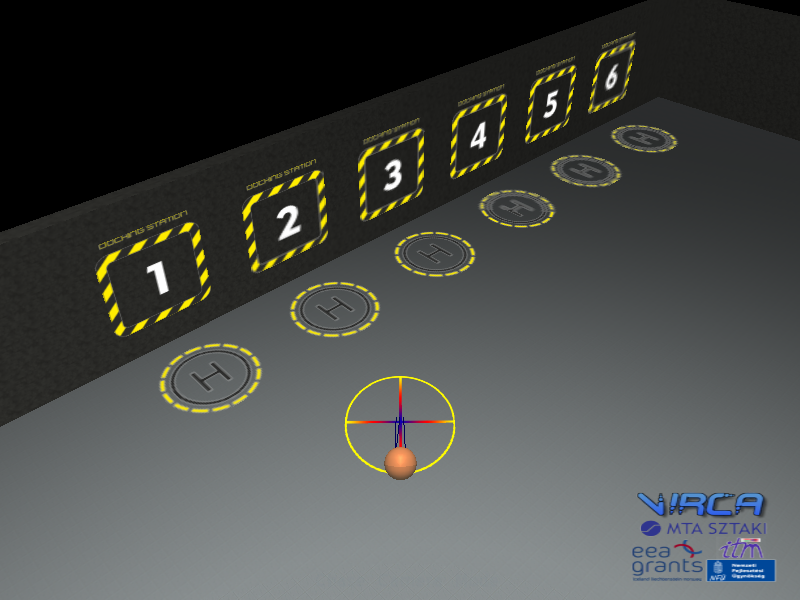
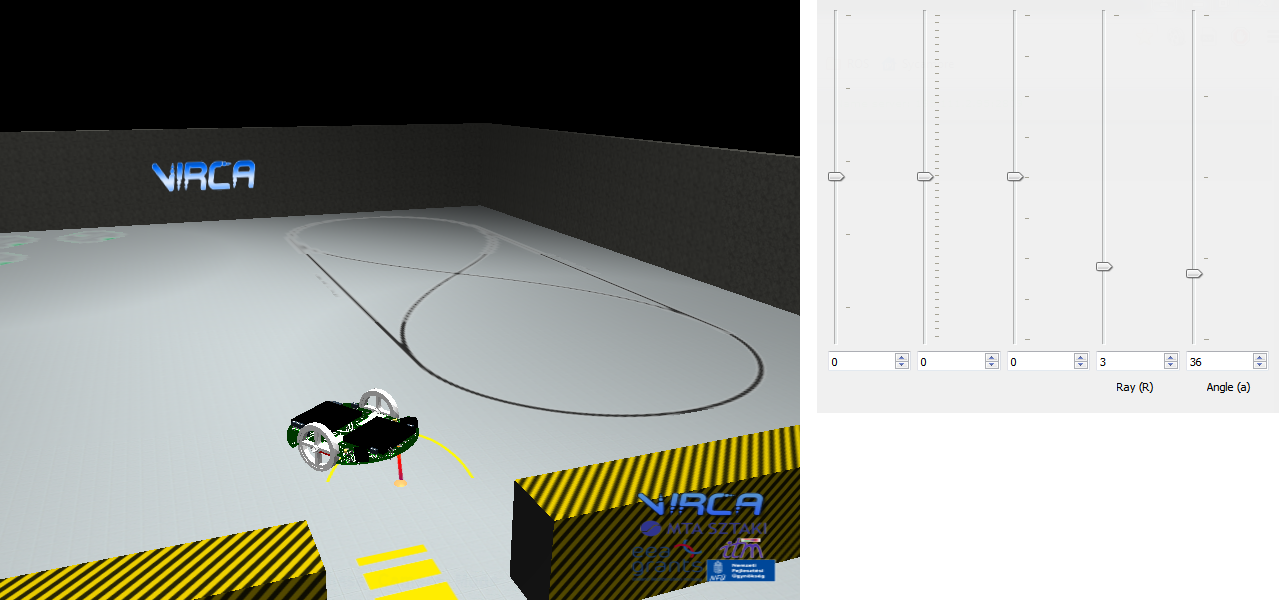
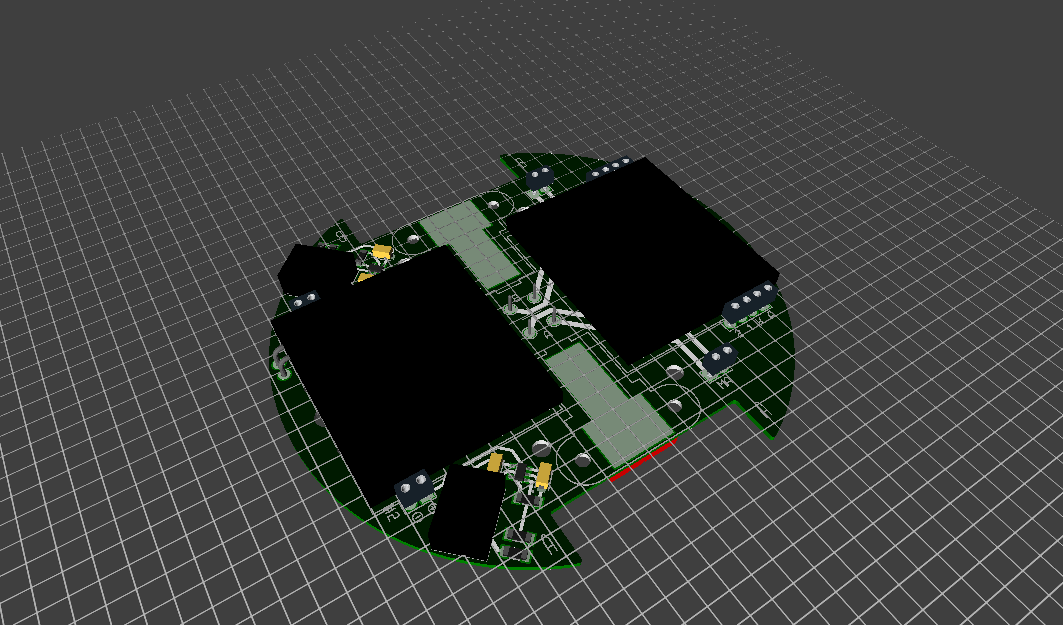
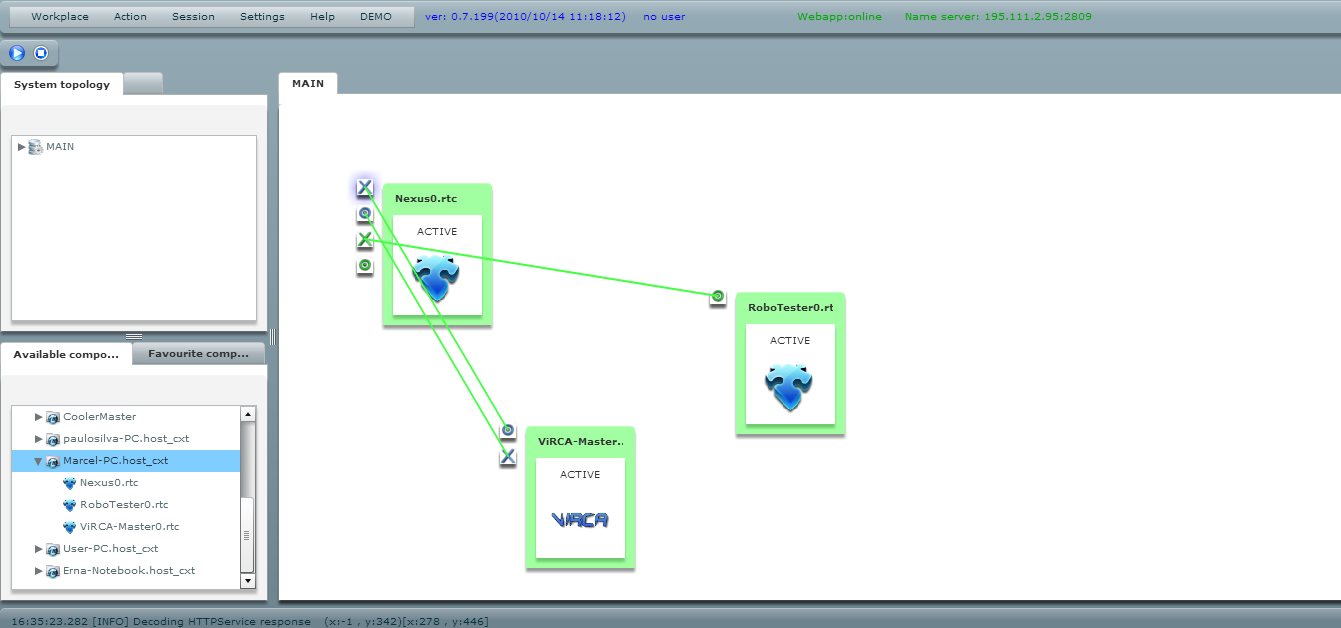
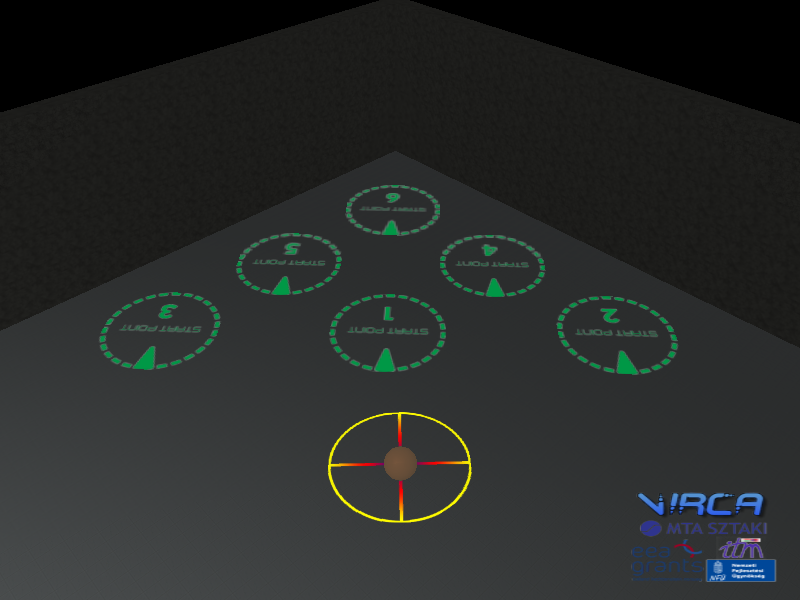
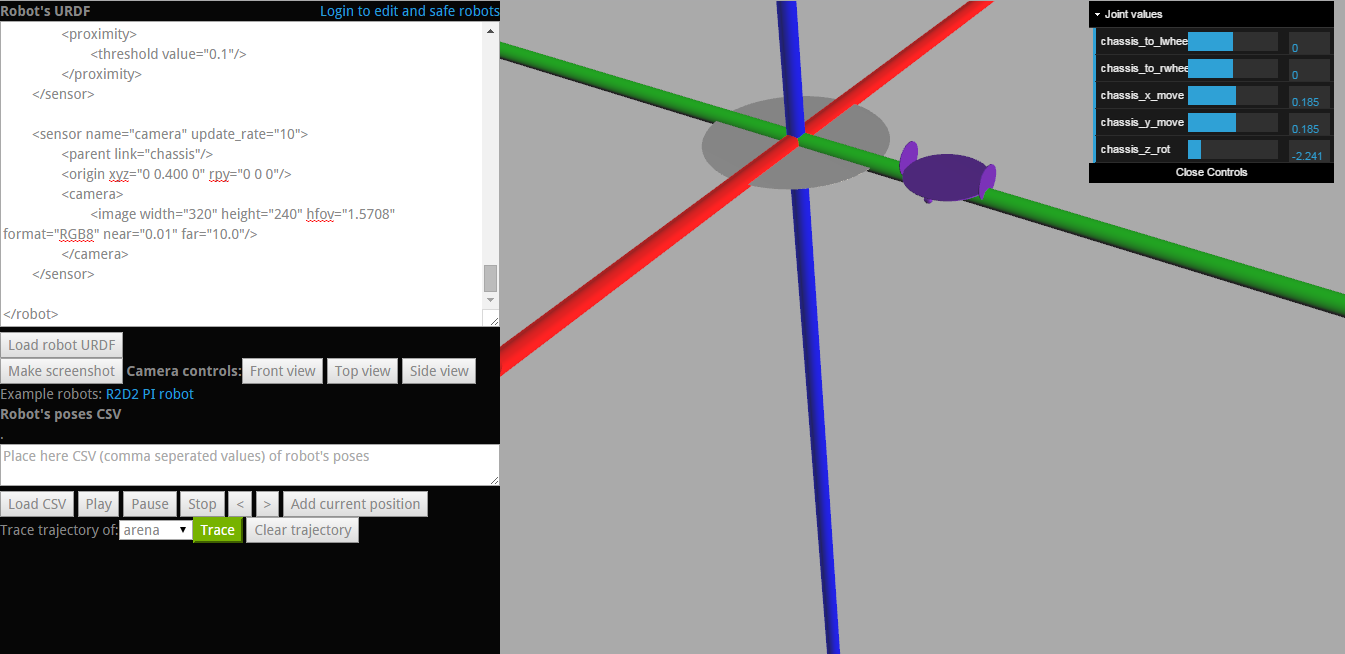
Fig. 1: Familiarization with the VirCA environment, installation, VirCApedia, data formats, interaction between elements Fig. 2: Modelling a 3D object using SketchUp from a PCB of an existing robot of a swarm (NEXUS) Fig. 3: Defining kinematics for the NEXUS robot CyberDevice using URDF data format Fig. 4: Controlling a NEXUS robot CyberDevice in the VirCA environment using a QT-based user interface and RTM Fig. 5: Integration of a NEXUS robot CyberDevice in a new VirCA room - Definition of new common projects in robotics using VirCA - The VirCA platform was found suitable for the design of a simulator for Nexus robot swarms.
Project Images :
.

VISIONAIR / Grenoble INP / 46 avenue Felix Viallet / F-38 031 Grenoble cedex 1 / FRANCE
Project funded by the European Commission under grant agreement 262044
Project funded by the European Commission under grant agreement 262044