
Title : Visualization of robot arm driven by PMSM motor
Project Lead : Topaloglu ismail From : Cankiri Karatekin University (TURKEY)
Dates : from 2014-05-07 14:14:58 to 2015-02-05 13:58:25
Description :
Motivation and objectives :
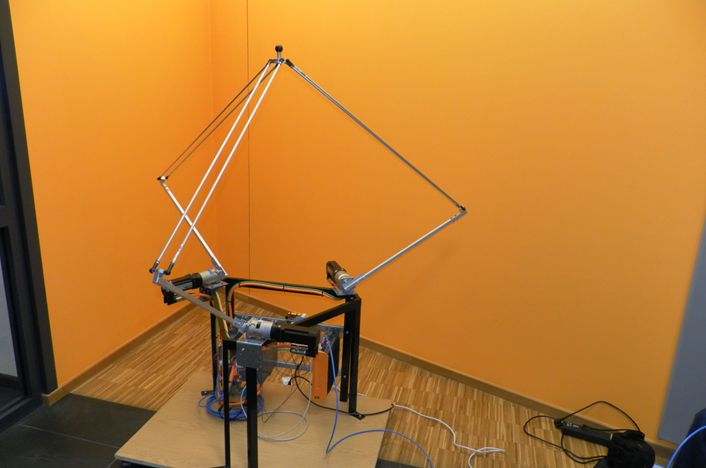
Various electric motors are widely used in many technical fields. Recently, researchers and producers improve both motor constructions and controlling units, depending on the application. Apart from classical drives there is a group of synchronous motors, including special one: Permanent Magnet Synchronous Motor PMSM. This type of motor consists of permanent magnets attached to the rotor, and three windings on the stator, connected to power supply. Such driving system with PMSM allows regulating the motor rotary speed or shaft angular position. Specific design and art of work of PMSM requires complex control system. Therefore, PMSM motors require special control units equipped with inverter, adequate position measuring sensor and processing unit. The possibility of very accurate position control, allows to apply the PMSM motors in demanding driving systems, like CNC feed drive systems, electronic cams, robotic arm drives, especially robots with a parallel cinematics etc. The last example refers to the future objective of the proposed project Visualisation of robot arm driven by PMSM motor. Due to the complexity of such a robot and its safety issues, it is recommended to build at first the simulation model of the system in order to check the correctness of e. g. control algorithm or safety procedures, then visualise the results in Virtual Reality system (like Matlab Simulink 3D Animation Toolbox or SimMechanics and later EON Studio). In the first part of the project the theoretical description of the drive and then the robot arm will be worked out. Then basing of the formulated equations the simulation model of PMSM with its drive in Matlab-Simulink environment will be prepared and simulation will be performed. In the next step to the model a robot arm will be included and the drive controller will be aligned and finally the whole model of a robot will be built in VR environment. S uch model will be developed according to achieved results and compared, through the visualisation, with the reality. It is necessary to perform the research in two phases: first simulation, second visualisation. Matlab Simulink environment is suitable for simulation and solving problems, where EON Studio is more efficient in visualisation tasks. The use of the PMSM motors in DELTA type parallel robot needs better understanding of the system properties, which may be enhanced by building the model, therefore the proposed project results may be very useful.
Teams :
Control and automation technology, driver system and theirs software.
Dates :
starting date : 11 August, 2014
ending date : 05 September, 2014
Facilities descriptions :
http://visionair-browser.g-scop.grenoble-inp.fr/visionair/Browser/Catalogs/VDS.PL.html
Recordings & Results :
Model of the robotic arm driven by PMSM motor has been developed. Visualisation and simulation of robotic arm driven by PMSM motor in Virtual Reality system was conducted. Comparison and improvements of robot prototype visualization have been realized.
Conclusions :
Model of the robotic arm driven by PMSM motor has been developed. Visualisation and simulation of robotic arm driven by PMSM motor in Virtual Reality system was conducted. Comparison and improvements of robot prototype visualization have been realized.
Project Images :



.

VISIONAIR / Grenoble INP / 46 avenue Felix Viallet / F-38 031 Grenoble cedex 1 / FRANCE
Project funded by the European Commission under grant agreement 262044
Project funded by the European Commission under grant agreement 262044