
Title : human-like robot haptic perception
Project Lead : miriam reiner From : Technion (Israel)
Dates : from 2014-01-06 08:54:24 to 2015-02-24 23:08:16
Description :
Motivation and objectives :
Networks in which robots and humans interact, require that robots have an extended valid haptic capability. Such a haptic ability is at the moment much needed and crucially missing. In addition touch and gesture interactions have recently become standard in mobile phones, gadgets tablet and desktop computers. As a result the efforts invested in developing inexpensive and effective haptic feedback for touch screen interaction have also increased and resulted in some new interfaces. The goal of this project is to test an especially interesting algorithm for robot sensation of the environment including a human in a social context. Such tactile feedback not only increases the effectiveness of touch interactions, but also leads to more realistic and satisfying experience in human robot interaction. We plan to test a new haptic technology inserted into a robot arm for touch and haptic performance skills with objects and including touching a human hand to perceive, bones and similar physical deformations.
Teams :
The virtual environments and computer graphics group's research spans the range from real-time computer graphics rendering to human factors issues in virtual reality. A common theme is that we want to understand how to make virtual reality effective. We carry out experiments with participants, in order to examine just what makes a difference to their sense of presence in the virtual environment, and their sense of co-presence with other people. We research on the issues involved in populating our virtual environments with crowds. This is not only a technically interesting challenge, but we know from our experimental work that empty environments, places without people don't work. Head of the group is Prof. Anthony Steed, who is a Professor in the Virtual Environments and Computer Graphics group in the Department of Computer Science, University College London. Prof Anthony Steed is currently head of the group. His research area is in real-time interactive virtual environments, with particular interest in mixed-reality systems, large-scale models and collaboration between immersive facilities. The group runs a CAVE-like facility
Dates :
starting date : 19 January, 2015
ending date : 30 January, 2015
Facilities descriptions :
http://visionair-browser.g-scop.grenoble-inp.fr/visionair/Browser/Catalogs/REACTOR.UK.html
Recordings & Results :
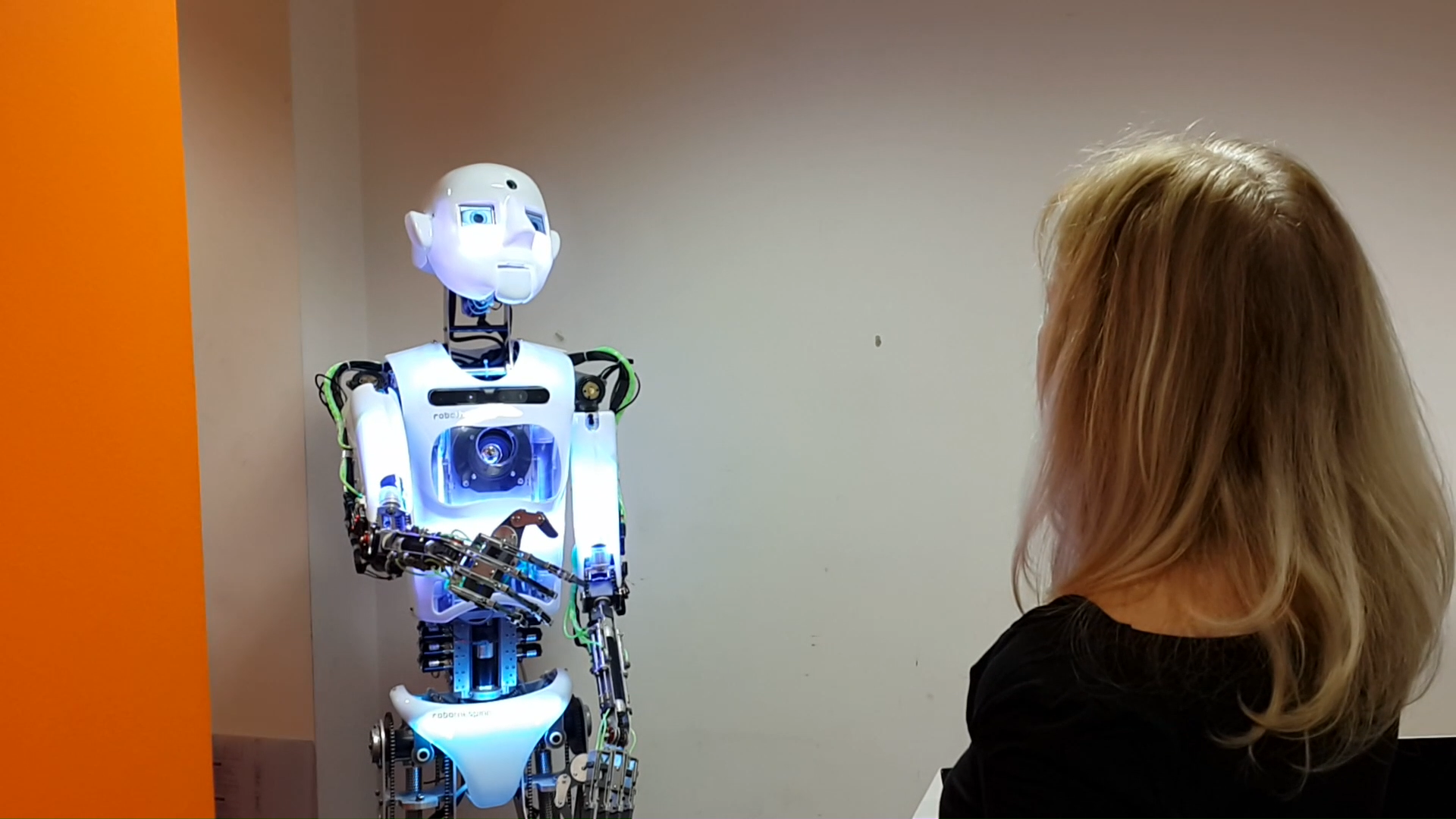
Trust is a major issue in human-robot interaction - a good example of this is in the use of robots in surgical procedures. A new class of humanoid robots, such as Robothespian used in this project, are designed for social tasks (e.g. presentation, education) and can be programmed to use human-like gestures in communication and interaction. In this study we looked at what happens to user trust when we deliberately "break" this interaction.
Conclusions :
- Robothespian robot was programmed to track the user's hand gestures and to follow these with it's (the robot's) hand and gaze (mimicry condition) - An alternative programming caused this tracking to stop working and for the robot to look and gesture with no regard for the user's actions (random condition). - The interaction design was refined to ensure that the robot's movements seemed natural (regardles of whether this was the tracked or random condition) - An experimental design was completed (although there was not sufficient time to run this as a full experiment we plan to complete this study) - We are already discussing possibilities for funding to extend this collaboration
Project Images :
Other project resources :
head_eyes_track_hand.mp4
arms_head_eyes_track_hand.mp4
Document1.pdf
.

VISIONAIR / Grenoble INP / 46 avenue Felix Viallet / F-38 031 Grenoble cedex 1 / FRANCE
Project funded by the European Commission under grant agreement 262044
Project funded by the European Commission under grant agreement 262044